
Building Top 1% Digit Recognizer Using Improved LeNet5, Augmentation and Ensemble
After finishing the Deep Learning Specialization, I had a chance to apply what I learnt by participating a Deep Learning competition in Kaggle.
Here is what I did:
- Using
pytorchto build a neural network architecture. - Understanding the concept of
DatasetandDataLoaderinpytorch. - Practicing data augmentation to increase the size of training dataset with different techniques.
- Improving LeNet5 architecture (i.e. adding Batch Norm, Dropout, channels) in order to achieve a better result.
- Impelementing a simple ensembling method.
- Achieving a great score (0.99742 - top 1%) without using the original dataset.
Import Library
# Import libraries
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
%matplotlib inline
from sklearn.model_selection import train_test_split
import time
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader, Dataset, ConcatDataset
from torchvision import transforms
import torch.optim as optim
Import Data
# Read csv files
train_df = pd.read_csv('/kaggle/input/digit-recognizer/train.csv')
test_df = pd.read_csv('/kaggle/input/digit-recognizer/test.csv')
submit_df = pd.read_csv('/kaggle/input/digit-recognizer/sample_submission.csv')
# Number of pixels
num_pixel = len(train_df.columns) - 1
print(num_pixel)
Augmentation, Datasets and DataLoaders
# Create transformers with different settings
transform_0 = transforms.Compose([
transforms.ToPILImage(),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])
])
transform_1 = transforms.Compose([
transforms.ToPILImage(),
transforms.RandomRotation(30),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])
])
transform_2 = transforms.Compose([
transforms.ToPILImage(),
transforms.RandomAffine(degrees=15, translate=(0.1,0.1), scale=(0.8,0.8)),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])
])
transform_3 = transforms.Compose([
transforms.ToPILImage(),
transforms.RandomAffine(degrees=30, scale=(1.1,1.1)),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])
])
transform_4 = transforms.Compose([
transforms.ToPILImage(),
transforms.RandomAffine(degrees=30, translate=(0.1,0.1)),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])
])
transform_5 = transforms.Compose([
transforms.ToPILImage(),
transforms.RandomAffine(degrees=10, shear=45),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])
])
# Write a class that transform a DataFrame to PyTorch Dataset
# The custom dataset inherits Dataset
class DataFrame_to_Dataset(Dataset):
def __init__(self, df, transform=transform_0):
# Get features and labels
if len(df.columns) == num_pixel:
# Test dataset
self.features = df.values.reshape((-1,28,28)).astype(np.uint8) # .astype(np.uint8) for ToPILImage transformer
self.labels = None
else:
# Train dataset
self.features = df.iloc[:,1:].values.reshape((-1,28,28)).astype(np.uint8)
self.labels = torch.from_numpy(df.label.values)
# Transformer
self.transform = transform
def __len__(self):
return len(self.features)
def __getitem__(self, index):
if self.labels is not None:
return self.transform(self.features[index]), self.labels[index]
else:
return self.transform(self.features[index])
# Create DataLoaders from custom datasets
def create_dataloaders(seed, test_size=0.1, df=train_df, batch_size=32):
# Create training set and validation set
train_data, valid_data = train_test_split(df, test_size=test_size, random_state=seed)
# Create Datasets
train_dataset_0 = DataFrame_to_Dataset(train_data)
train_dataset_1 = DataFrame_to_Dataset(train_data, transform_1)
train_dataset_2 = DataFrame_to_Dataset(train_data, transform_2)
train_dataset_3 = DataFrame_to_Dataset(train_data, transform_3)
train_dataset_4 = DataFrame_to_Dataset(train_data, transform_4)
train_dataset_5 = DataFrame_to_Dataset(train_data, transform_5)
train_dataset = ConcatDataset([train_dataset_0, train_dataset_1, train_dataset_2, train_dataset_3, train_dataset_4, train_dataset_5])
valid_dataset = DataFrame_to_Dataset(valid_data)
# Create Dataloaders
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
valid_loader = torch.utils.data.DataLoader(valid_dataset, batch_size=batch_size, shuffle=False)
return train_loader, valid_loader
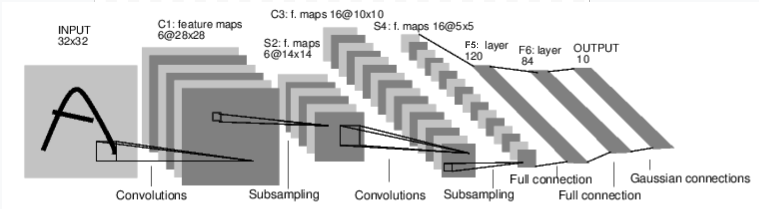
LeNet5 with Improvements
- Two stacked 3x3 filters replace the single 5x5 filters.
- A convolution with stride 2 replaces pooling layers. These become learnable pooling layers.
- Batch normalization is added
- Dropout is added
- More feature maps (channels) are added
# Create an improved LeNet5 neural network
class Net(nn.Module):
def __init__(self):
# Super function. It inherits from nn.Module and we can access everythink in nn.Module
super().__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(1, 32, kernel_size=3),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True), # inplace=True helps to save some memory
nn.Conv2d(32, 32, kernel_size=3),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.Conv2d(32, 32, kernel_size=5, stride=2, padding=14), # compute same padding by hand
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.MaxPool2d(2, 2),
nn.Dropout2d(0.25)
)
self.conv2 = nn.Sequential(
nn.Conv2d(32, 64, kernel_size=3),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True), # inplace=True helps to save some memory
nn.Conv2d(64, 64, kernel_size=3),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=5, stride=2, padding=6), # compute same padding by hand
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(2, 2),
nn.Dropout2d(0.25)
)
self.conv3 = nn.Sequential(
nn.Conv2d(64, 128, kernel_size=4),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Dropout2d(0.25)
)
self.fc = nn.Sequential(
nn.Linear(128*1*1, 10)
)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
x = x.view(-1, 128*1*1)
x = self.fc(x)
return x
# Get the device
use_cuda = torch.cuda.is_available()
print(use_cuda)
# Train the net with a seed and a number of epochs
def train(seed, num_epochs):
# Train and valid dataloaders
print('Creating new dataloaders...')
train_loader, valid_loader = create_dataloaders(seed=seed)
# Model
print('Creating a new model...')
net = Net()
# Loss function
criterion = nn.CrossEntropyLoss()
# Move to GPU
if use_cuda:
net.cuda()
criterion.cuda()
# Optimizer
optimizer = optim.Adam(net.parameters(),
lr=0.003, betas=(0.9, 0.999),
eps=1e-08, weight_decay=0,
amsgrad=False)
# Sets the learning rate of each parameter group to the initial lr decayed by gamma every step_size epochs
scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=3, gamma=0.1)
print('Training the model...')
for epoch in range(num_epochs):
net.train() # Training mode -> Turn on dropout
t0 = time.time()
training_loss = 0.0
num_samples = 0
for features, labels in train_loader:
# Move data to GPU
if use_cuda:
features = features.cuda()
labels = labels.cuda()
# Zero the parameter gradients
optimizer.zero_grad()
# Forward + Backward + Optimize
outputs = net(features)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# Update loss
training_loss += loss.item()
num_samples += len(features)
# Compute accuracy on validation set
net.eval() # Evaluation mode -> Turn off dropout
correct = 0
total = 0
with torch.no_grad():
for valid_features, valid_labels in valid_loader:
# Move data to GPU
if use_cuda:
valid_features = valid_features.cuda()
valid_labels = valid_labels.cuda()
outputs = net(valid_features)
_, predicted = torch.max(outputs, 1)
total += valid_labels.size(0)
correct += (predicted == valid_labels).sum().item()
scheduler.step()
print('[model %d, epoch %d, time: %.3f seconds] train_loss: %.5f, val_acc: %4f %%' %
(seed + 1, epoch + 1, time.time() - t0, training_loss/num_samples, 100 * correct / total))
# Prediction
net.eval() # Evaluation mode -> Turn off dropout
test_pred = torch.LongTensor()
if use_cuda:
test_pred = test_pred.cuda()
with torch.no_grad(): # Turn off gradients for prediction, saves memory and computations
for features in test_loader:
if use_cuda:
features = features.cuda()
# Get the softmax probabilities
outputs = net(features)
# Get the prediction of the batch
_, predicted = torch.max(outputs, 1)
# Concatenate the prediction
test_pred = torch.cat((test_pred, predicted), dim=0)
model_name = 'model_' + str(seed + 1)
ensemble_df[model_name] = test_pred.cpu().numpy()
print('Prediction Saved! \n')
Ensemble
# Create test_loader
test_dataset = DataFrame_to_Dataset(test_df)
test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=32, shuffle=False)
ensemble_df = submit_df.copy()
# Start training
num_models = 11
num_epochs = 6
for seed in range(num_models):
train(seed, num_epochs)
Prediction
# Final prediction
final_pred = ensemble_df.iloc[:,2:].mode(axis=1).iloc[:,0]
submit_df.Label = final_pred.astype(int)
# Create a submission file
submit_df.to_csv('submission.csv', index=False)